We do this not because it is easy, but because we thought it would be easy.
This is the unofficial motto of WüSpace, a student organization in Würzburg.

Our current main project, S²OUTH, is the perfect explanation why we choose this slogan as our motto. In this project we are developing a modern and reliable telemetry system for rockets. The goal of the system is to provide live telemetry including sensor data, and high precision pose estimation for the entire duration of a suborbital space shot flight. Furthermore the project includes a secondary high bandwidth RF link to stream high fidelity video of the rocket during the flight.
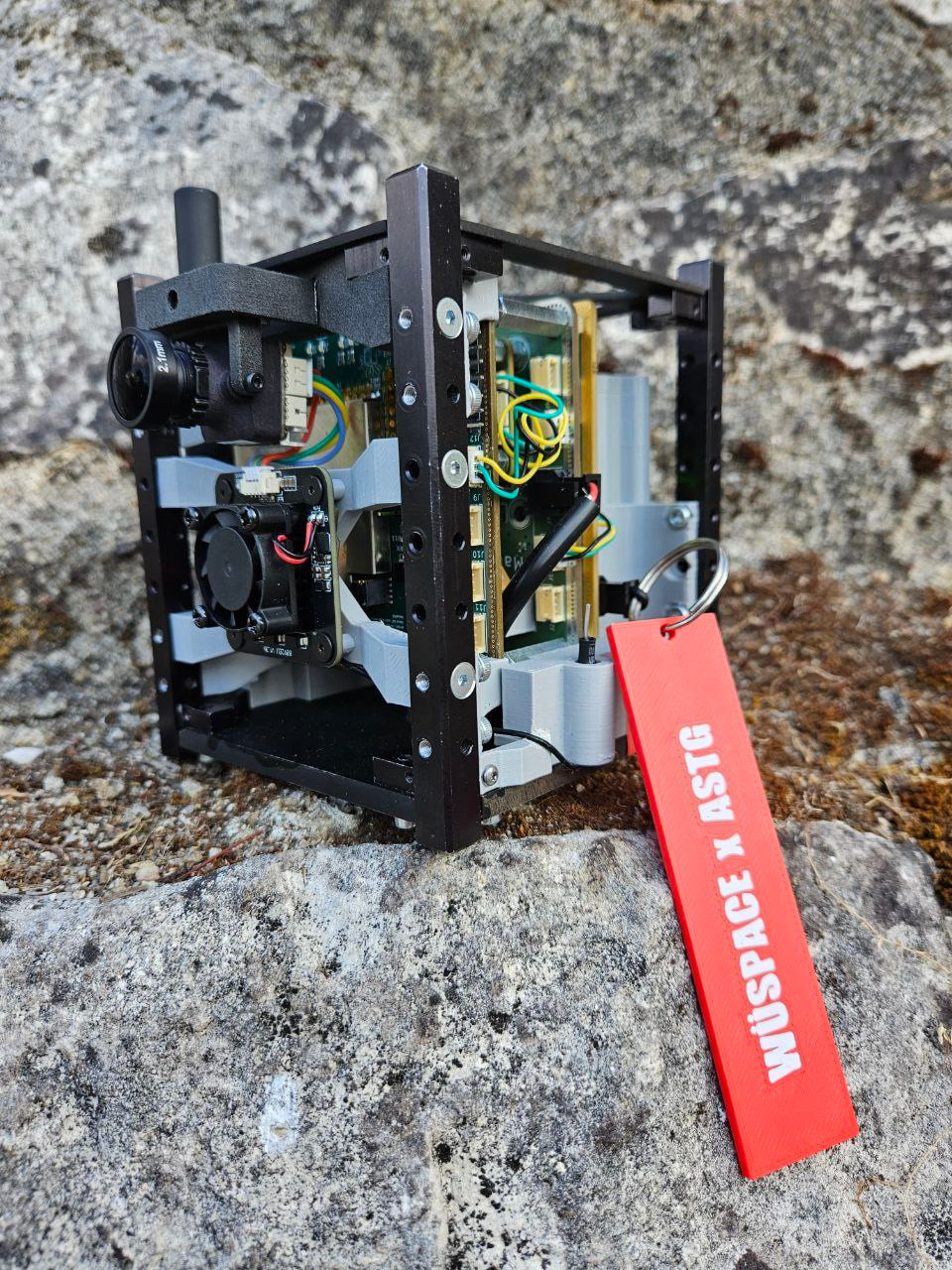
The project was originally conceived in collaboration with the student team from HyEnD Stuttgart for usage in their N₂ORTH hybrid propellant rocket. Since then a preliminary version of the project named South Cube has flown as payload on the Ispida rocket build by Aerospace Team Graz (ASTG) and further options for collaborations with student teams are being explored.
Avionics Design
As nearly our entire team consists of aerospace computer science students, we had quite a hard time learning how to design PCBs. But some of us thought it would be a good idea to self study electrical engineering during our normal studies. As expected, the first iteration of the system was riddled with problems like unclean power supply or a non functioning micro SD card. But with lot of caffeine and trial and error we figured out how to improve from our mistakes.
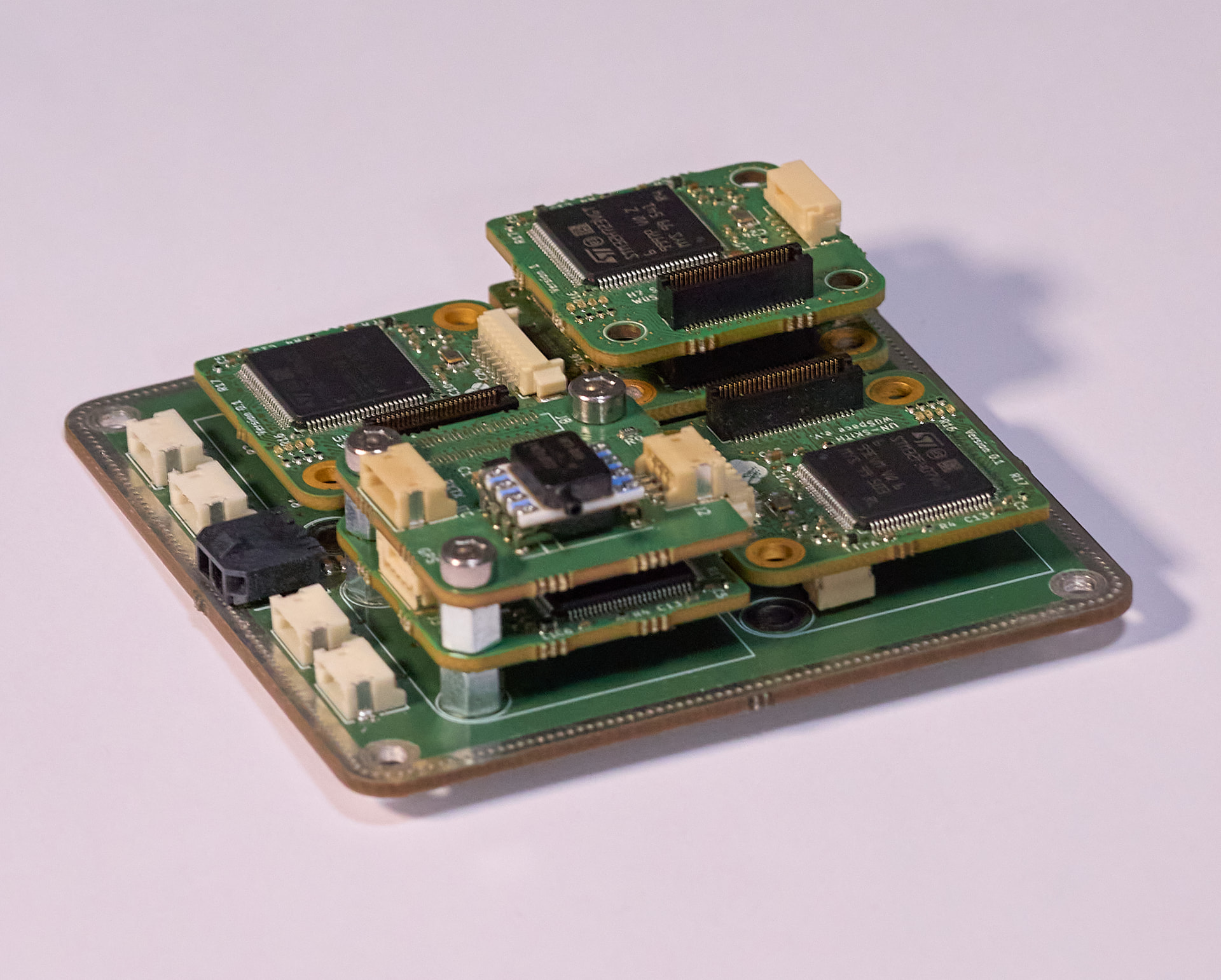
The flight stack uses 2 separate redundant CAN busses which connect to every board.
The uppermost PCB is our Pyro-board and has just one simple aim. Trigger the drogue parachute to slow down the rocket.
Underneath the LST (telemetry sender) is located. It collects the relevant messages from every other board via the CAN busses and sends this telemetry to the ground station. It uses a 437 MHz radio down-link.

Most of the data which are send by the LST are measurements from the Upper-sensor-board. This is the Main-board with two imu’s, a magnetometer and a barometer. One aim of N₂ORTH is to reach a height over 100 km, so we need all of these sensor to determine the actual height of the rocket.
The measured data is processed by our H7-Skith module, which is based on the STM32H723 microcontroller. The core concept behind these two boards is their modularity: they can be stacked in various combinations to create flexible system configurations. On the H7-Skith, a Kalman filter is implemented to estimate the system’s pose based on the measured data.
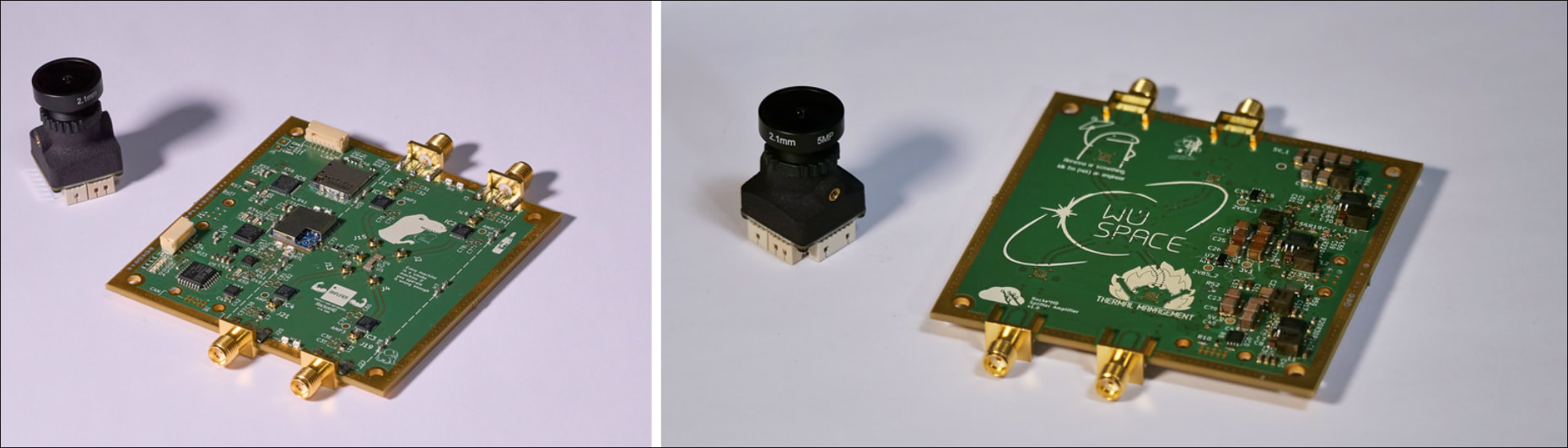
In addition to the sensor data, a live video stream is transmitted over a 5.8 GHz wireless link. The RocketHD board captures the video using camera software based on the OpenIPC framework. We use a wifi module, whose signal is then split into four paths, amplified, and transmitted through four patch antennas.
For collecting data and debugging before the rocket start we use the Ground adapter (umbilical board). The board also has a STM32H723 microcontroller and an Ethernet-switch to communicate with the CAN bus.
The current launch plan includes a post-flight recovery of the rocket. For this reason, we use a dedicated Black-box that records all CAN bus data and stores it on an Micro SD card. If power is lost, the system performs a final flush to preserve all remaining data.
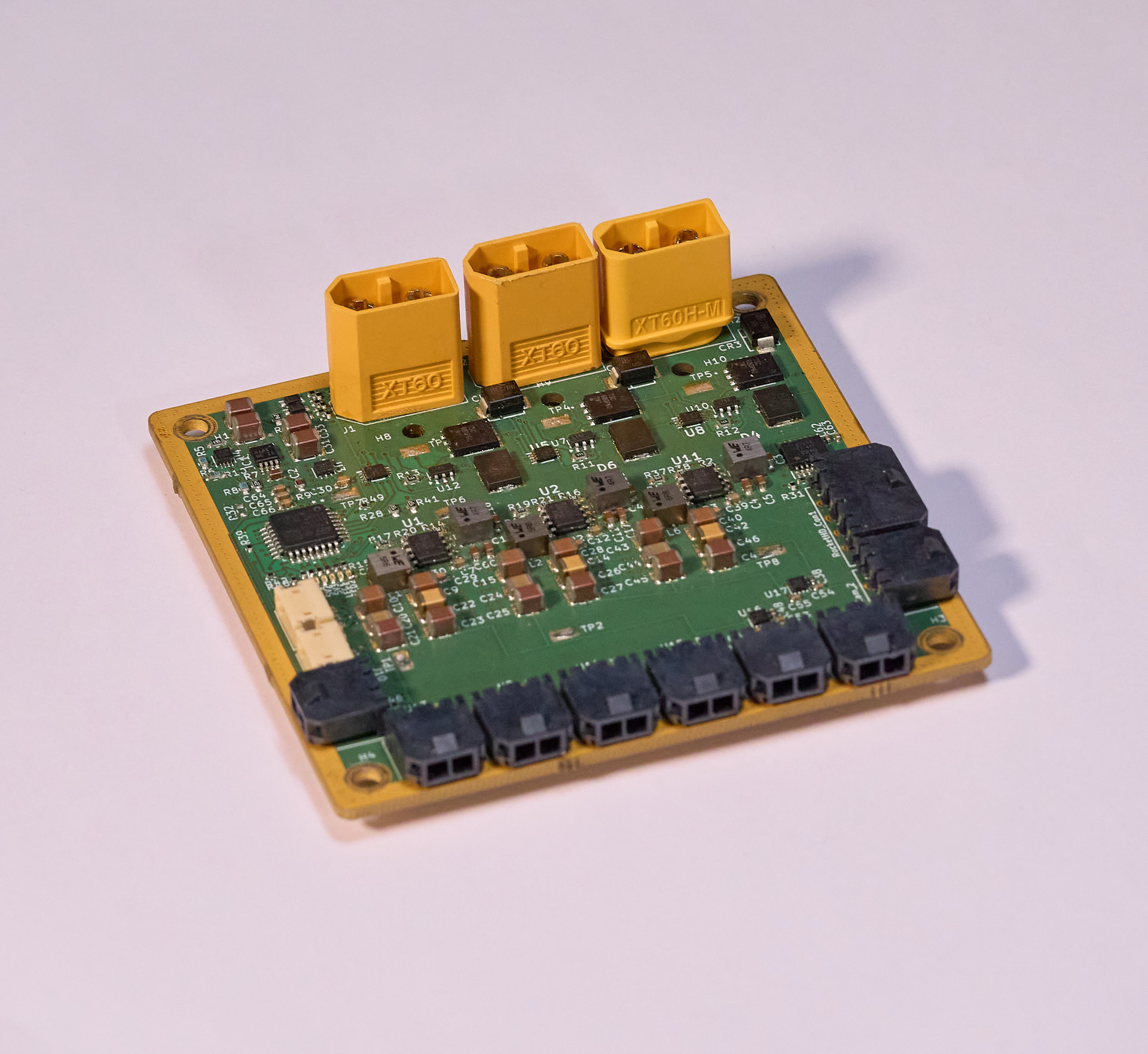
The EPS-board takes input power from two batteries and from the ground segment. It provides the flexibility to choose the most suitable power source or a combination of sources. After selection, the voltage is regulated to 5 V and supplied to all connected boards.
The last board is the Lower-Sensor-board, which is located at the bottom of the rocket and is used to collect temperature and pressure readings from tanks and the rocket engine. This data is then send through the CAN bus to the H7-Skith.
As you can see, we had enough boards to improve our PCB design skills and and after several hardware iterations the boards are now operating as intended. Now we must implement the software and integrate our system in the rocket of the student team HyEnD to see our work flying.
We would also like to thank AISLER for sponsoring the production of many of our PCBs. Their excellent service and support have been invaluable throughout the development process.