Introduction
Where are we from?
Good morning AISLER community, we are the Sapienza Space Team, a university team from Sapienza University of Rome. We are one of the four teams of SASA – Sapienza Aerospace Student Association, the largest Italian student engineering organization.
The association has more than 370 members from both STEM and non-STEM disciplines, creating a multidisciplinary environment that replicates the dynamics of an industrial reality and fosters the development of both technical and organizational skills.
Which goals do we have individually or as a team?
We focus on designing probes and satellites to participate in international competitions and calls for papers.
Why did we join or start a student team?
The team was founded in 2012 with the goal of bridging the gap between theoretical education and practical application, through the development of real engineering systems.
What competition are we playing in?
This year we will participate in the CanSat Competition: an annual project and international competition with 20 spots reserved for non-US teams. It consists of a full simulation of a space mission, from system design to launch, data acquisition, and autonomous probe landing.
Our Project
Technical Specifications and Avionics
The system integrates advanced monitoring and control technologies:
-
Sensors: Real-time acquisition (1 Hz) of altitude (atmospheric pressure), internal temperature, battery voltage, attitude (tilt and rotation angles), and GPS position.
-
Imaging: Two onboard cameras document the para-glider deployment and the ground view during instrument release.
-
Telecommunications: Data transmission to ground via XBEE radio and command management from a proprietary ground station.
-
Reliability: The design must withstand vibrations up to 15 G and mechanical shocks up to 30 G.
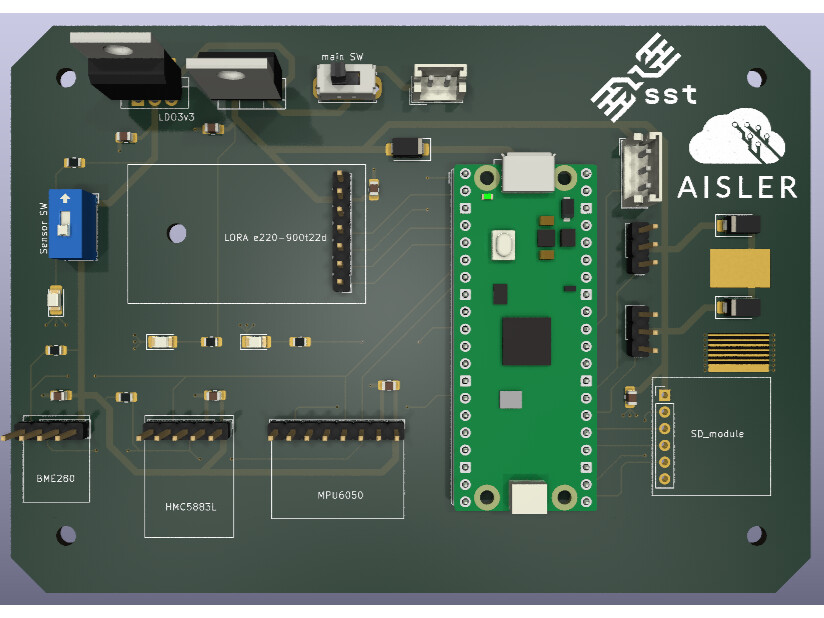
Our Electronics
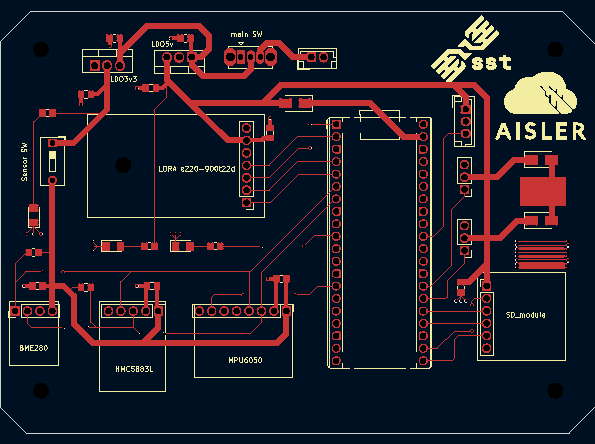
Some things we can talk about regarding the electronics of our project:
This PCB is a first prototype of avionics designed to collect environmental data and understand how to implement servo motor control in order to steer the paraglider of our miniature space probe: the CanSat.
What electronics do we have in our project?
The onboard electronics consist of a microcontroller (Raspberry Pi Pico based on the RP2040 processor), sensors, an SD card memory unit, a transceiver, and two servo motors.
What is their goal?
The goal is to launch the CanSat from a high altitude (about 1 km), collect pressure, temperature, and Earth’s magnetic field data, and land the probe in a designated location by controlling the paraglider direction via servo motors.
How have we designed them?
Using a PCB design software called KiCad.
Which PCB configuration did we use and why?
We chose a 2-layer PCB stackup due to its simplicity and low cost. Since there are few components, it was not necessary to use a 4-layer or more complex stackup.
What are our routing strategies?
First, we route the most “critical” traces, meaning signal lines (I2C, SPI), then we route the power lines. We used a ground plane as a best practice to reduce noise in the circuit. Power traces are made wide to reduce resistance, while signal traces are kept short to preserve data integrity.
What are some things that we have learned along the way?
We learned how to use EDA software for PCB design (in this case KiCad) and how to coordinate with the rest of the team to meet the mechanical and software requirements of the PCB.
Which sensors, MOSFETs or other components have we used to achieve our goals?
The sensors used are:
-
BME280 for temperature and humidity
-
MPU6050 as an accelerometer and rotation sensor
-
HMC5883L as a magnetometer to measure Earth’s magnetic field
-
LoRa E220-900T22D for communication with the ground station
-
An SD module to store data collected from the sensors
As a microcontroller, we chose a Raspberry Pi Pico dev board due to its low cost and ease of use.
Why did we use these components?
We selected these components because they are easily available on the market and low-cost.
We love the technical details, so we won’t hold back!
What is our favorite AISLER feature?
-
The rendering guarantee and PCB viewer
-
The blitz service that increases iteration speed to subsonic levels