Can we build a robot that balances dynamically on a single wheel, similar to how a human rides a unicycle?
This is the central question behind Focus Project Equilibrio, an ETH Zürich student project developed by an interdisciplinary team of twelve students from electrical and mechanical engineering. Our goal is to build a compact, one-wheeled robotic platform for dynamic locomotion, control, and future robotics research.
Equilibrio is inspired by the agility and balance of cross-country unicyclists. Instead of relying on flywheels or other passive stabilization mechanisms, the robot has to actively move its body, shift its center of mass, and react quickly to disturbances. This makes the system mechanically simple in concept, but highly demanding in practice.
A Compact but Complex Robotic System

The robot combines several tightly integrated subsystems. A central wheel provides efficient locomotion, while a three-degree-of-freedom hip mechanism enables balancing motions inspired by human movement. The torso houses the battery, sensors, computing hardware, and electronics, making it the central integration point of the system.
All of these components have to work together in real time. Motors, sensors, embedded systems, power electronics, mechanical structures, and control software are strongly interconnected. A small issue in one subsystem can quickly affect the behavior of the entire robot.
This is what makes Equilibrio both challenging and exciting. It is not only a mechanical structure, a control problem, or an electronics project. It is a complete robotic system where every design decision influences the rest of the platform.
Electronics as a Core Part of the Robot
For Equilibrio, the electronics are not just a support system. They are a central part of the robot’s architecture.
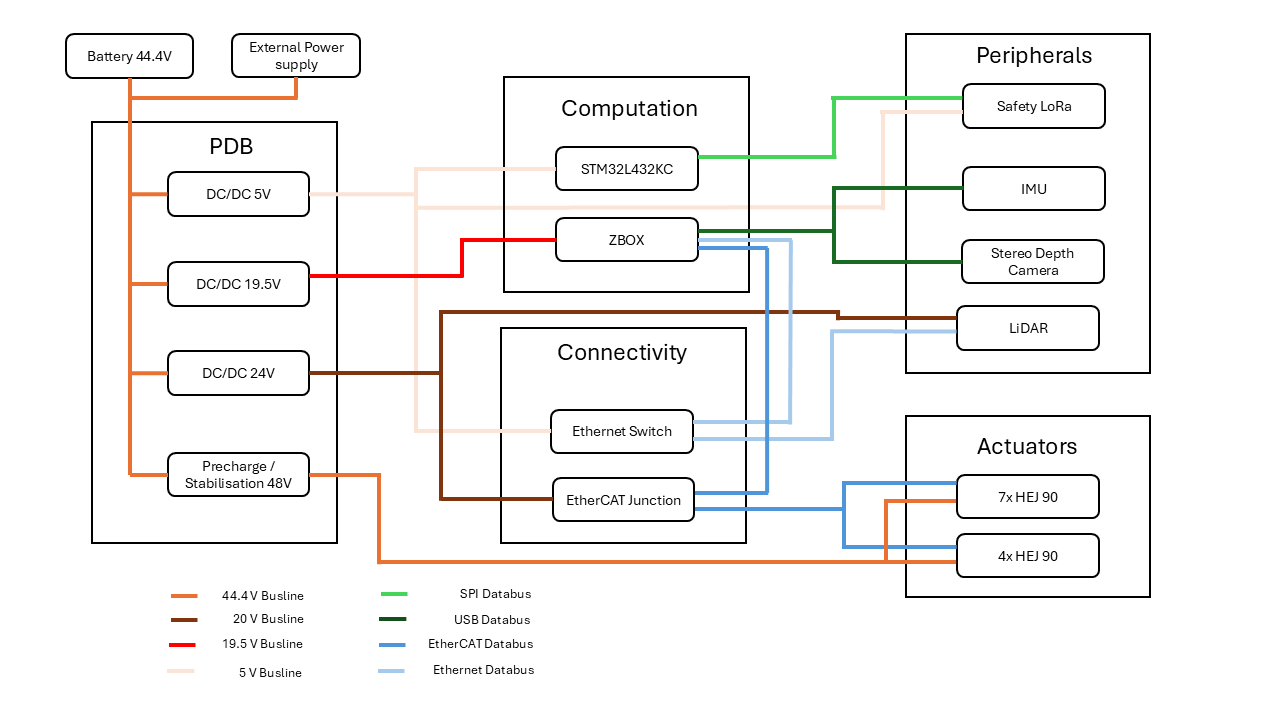
The electrical system has to distribute power safely, interface with sensors and actuators, connect to the onboard computing hardware, and operate reliably in a demanding environment with high currents, fast switching, motor controllers, communication interfaces, and real-time control requirements.
To make this possible, we designed custom PCBs for the robot. These boards allowed us to integrate the electrical system into the limited available space while keeping the design modular and serviceable. They also provided the exact interfaces we needed for our sensors, actuators, safety system, and power architecture.
Designing PCBs for a complex robotic platform also taught us many practical lessons. Some boards worked as intended from the beginning, while others revealed issues in layout decisions, connector placement, debugging access, power distribution, and signal routing. These experiences showed us how different real hardware can be from a schematic that looks correct on paper.
From PCB Design to Real Hardware
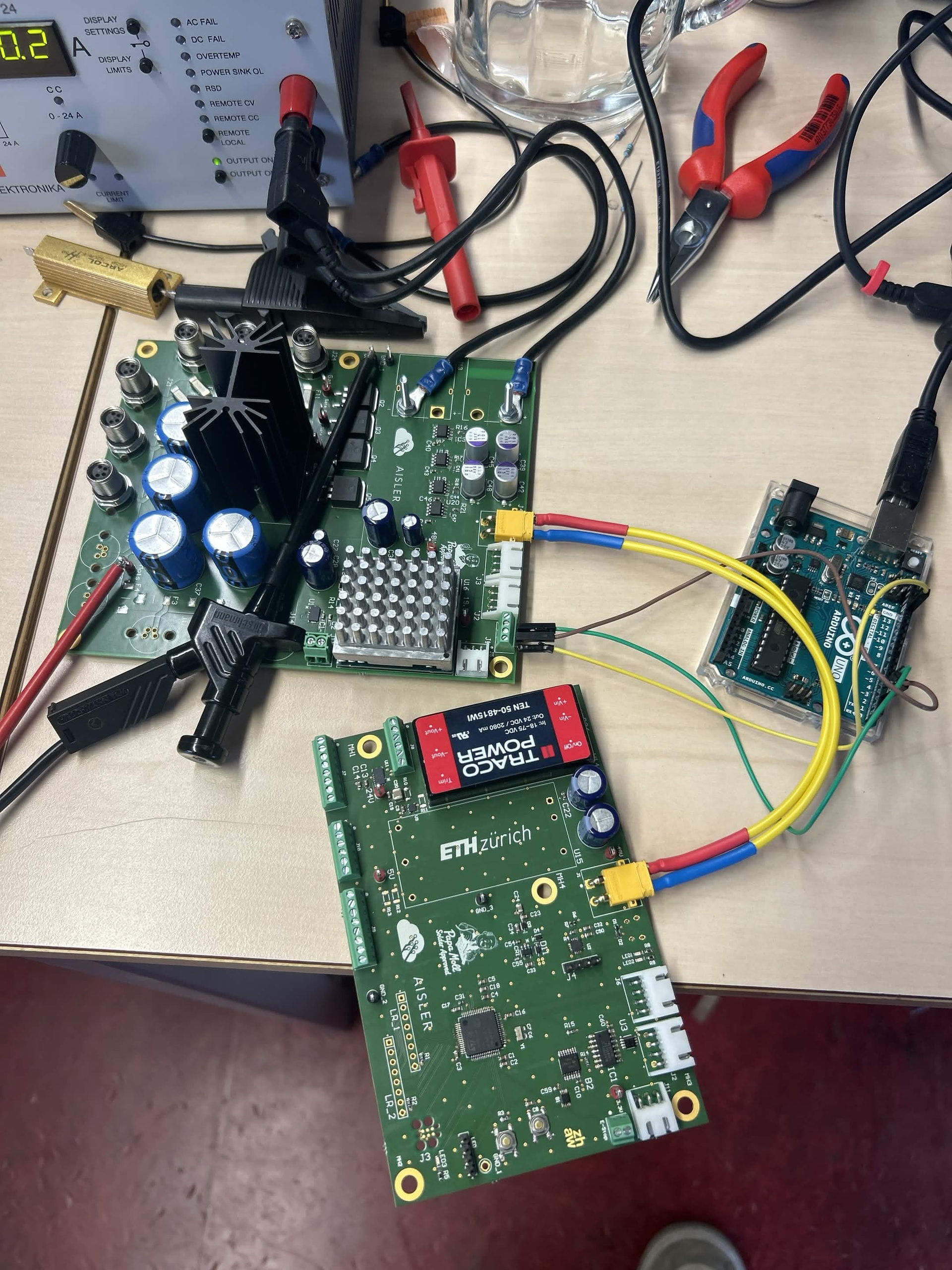
Thanks to Aisler, we were able to manufacture high-quality PCBs for Equilibrio and iterate on our designs throughout the project. Their support helped us turn electrical concepts, schematics, and layouts into real hardware that could be assembled, tested, debugged, and integrated into the robot.
This was especially valuable because reliable PCB manufacturing is crucial in a student project with a tight development timeline. Every board that arrived became part of the next integration step: soldering, measuring, testing, improving, and preparing the next revision.
Aisler’s support allowed us to test our ideas on real hardware, identify design issues early, and improve the electrical system based on practical experience instead of theory alone. For a project like Equilibrio, this difference is essential.
Outlook
Equilibrio is currently in the integration and testing phase. One of our major milestones was the ETH Focus Rollout Event on 27 May 2026, where we presented the current state of the robot and the progress made throughout the year.
Our goal is to bring the robot to stable balancing and use it as a platform for future experiments in control, locomotion, perception, and robotics research.
We are proud of what the team has achieved so far and grateful to all partners who helped make the project possible.
A special thank-you goes to Aisler for supporting us with PCB manufacturing and helping us turn our electrical designs into real, testable hardware.