Hello everyone,
We are KA-RaceIng, the Formula Student Team from Karlsruhe Institute of Technology. Each year, we design and build a new electric, autonomous race car to compete in international Formula Student competitions against teams from universities around the world.
For the 24/25 Season, Aisler gracefully provided us with numerous PCB manufacturings. In return, we offered to showcase some of these projects.
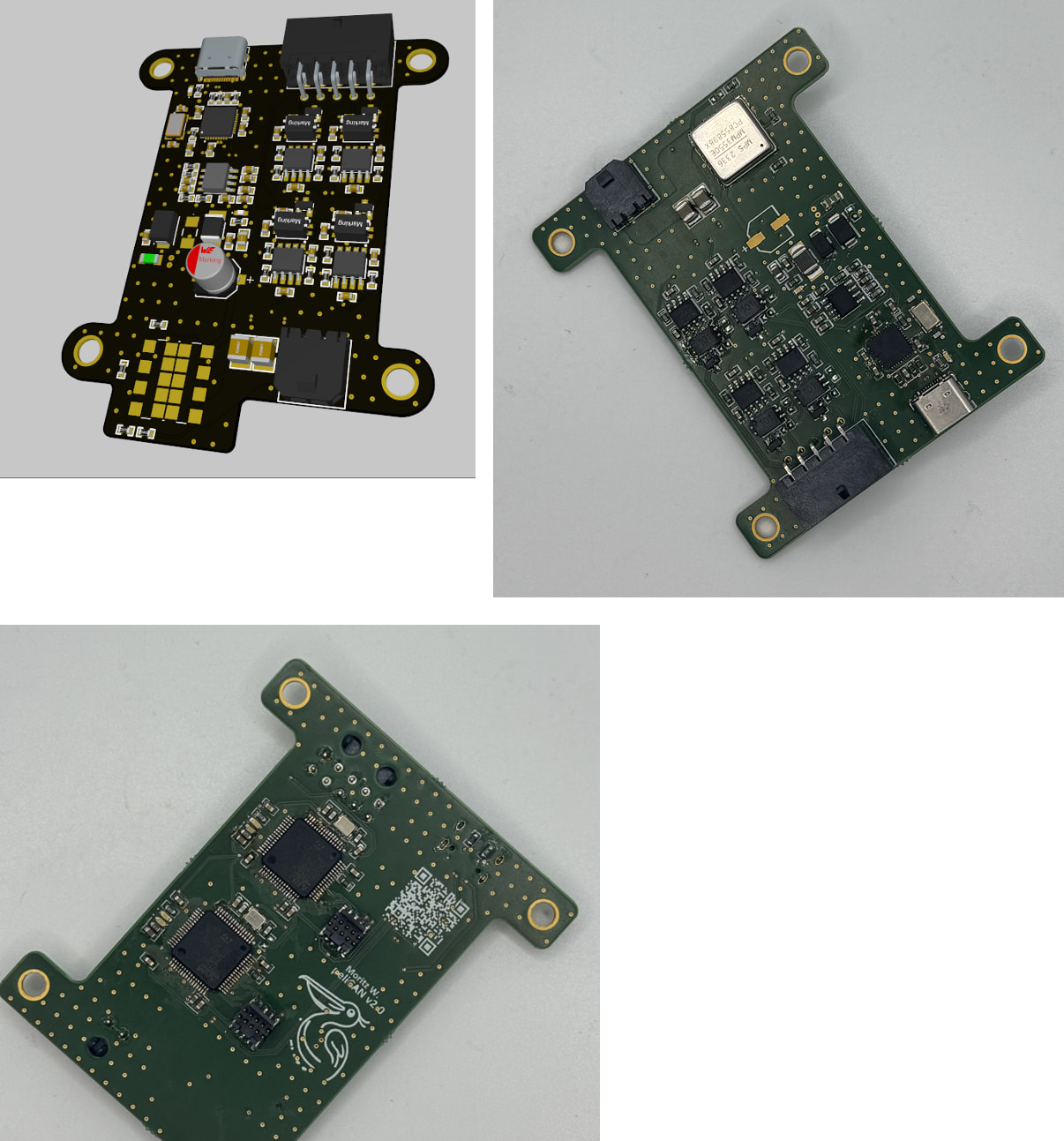
USB-CAN Bus Interface Board
Almost all boards in our car communicate via CAN bus. Our main control unit (MCU), where a lot of safety features are implemented and the majority of sensor measurements are aggregated, is an embedded x86 board which does not have a CAN interface out of the box. To connect it to our four CAN buses, we use a custom board (we call it the peliCAN) with two STM32F405s on it. They implement a usb protocol, which defines how usb interfaces can be attached to the linux kernel as socketcan interfaces. We use an open-source firmware for this which supports almost all STM32 models with both USB & CAN interfaces. The STMs each have two CAN interfaces, which we connect via four MAX33053 CAN transceivers to their respective bus. To allow both STMs to be connected via USB through one USB-C Port, we use a USB2514B-I/M2 USB Hub, directly next to the USB port. Next to that we again use a MPQ2029GN-AEC1-P, linear regulator to power a 3.3V rail from the USB provided 5V. Additionally on the board, we have a MPM3550EGLE switching regulator, which provides our embedded x86 board with 12V, regulated from the 24V vehicle voltage. This larger regulator is necessary since the board draws up to 5A during bootup.
Thanks again to Aisler for gracefully providing us with the manufacturing budget! I hope this small post gave you an insight into our electronics. For more information visit our website or socials.