Hello again from Racing Power Münster!
One of our main goals for the 25/26 season is the digitalization of our electric race car.
While functional, our last wire harness was a mess of measurement cables from all over the car to a central computer. One issue with that was the manufacturing of the harness and the sheer size of it.
At the core of the digitalization is CAN. To be more specific FDCAN.
CAN enables reliable communication even in challenging EMI environments with acceptable data throughput.
The Subsystem I want to show you is the Accelerator Pedal Position Sensor (APPS) Control Unit: ACU
The ACU is directly connected to two linear potentiometers on the accelerator pedal and the low voltage harness of the car.
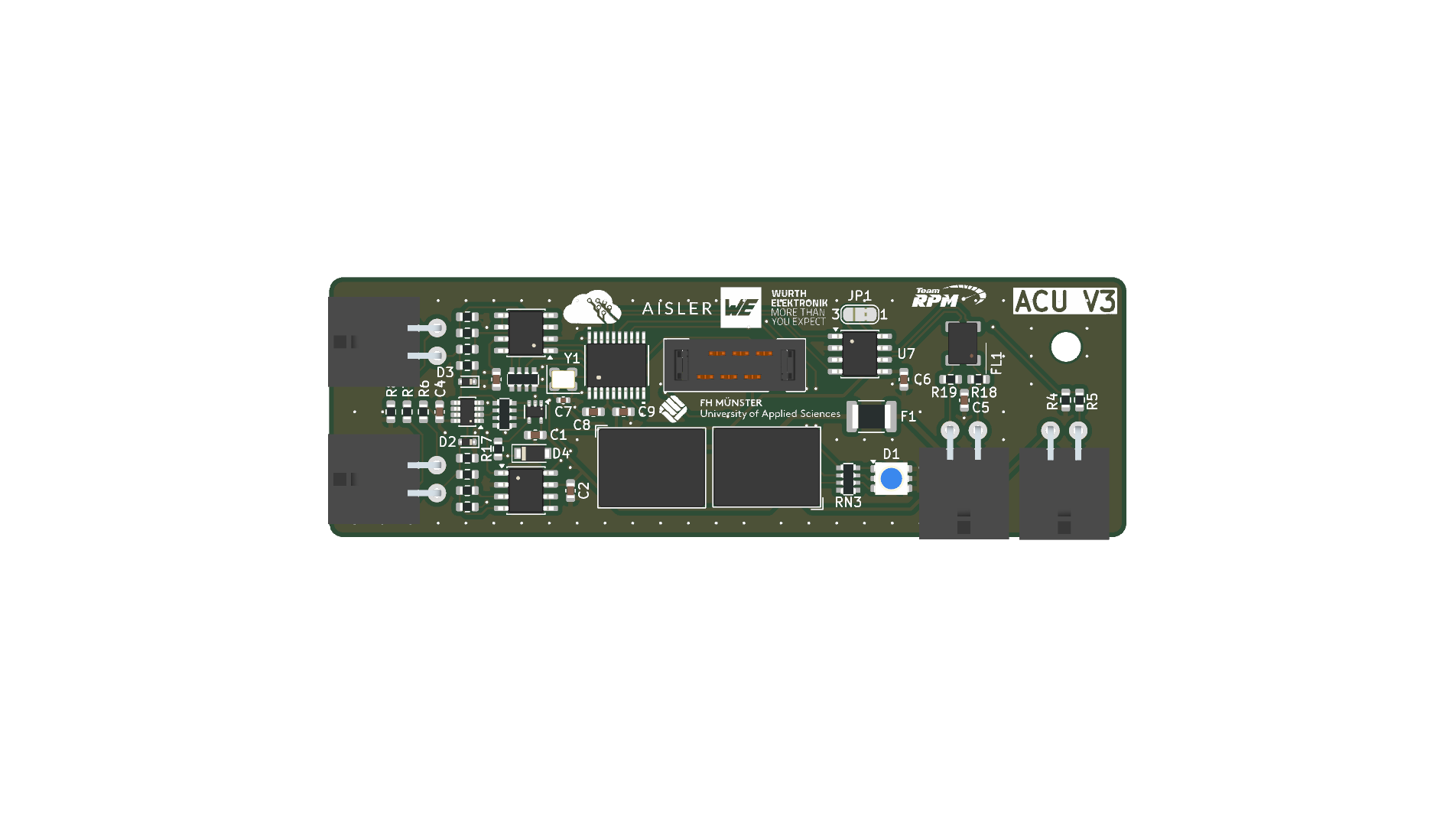
As the Pedal is pressed down, the voltage of the output pin changes. This change is detected by a microcontroller (STM32C092RC) and the now digital data is sent via the CAN bus to the Vehicle Control Unit.
The ACU also detects a fault in the wiring and can stop the power to the engine.
This is happening constantly when the car is powered on. 100 times a second.

We used Beautiful PCB and the stellar stencil option to build this vital part of our car.
A big thanks to Aisler for sponsoring our PCBs and providing such a fast turnaround time.