Analog Video Receiver was yet another significant project during the modernization of our vision system. As we have already presented in the previous post (link), the vision system on the rover consists of cameras, a multiplexer, and two 5.8GHz radio transmitters. To take full advantage of all the features, we had to design our own receiver.
The goal of the project was to create a two-channel receiver, where each of the channels would work in dual diversity mode. Just like the VTX on the rover, the new VRX can receive and execute commands sent from the base station. This gives our new video system the ability to change radio frequency on the go with just one command.
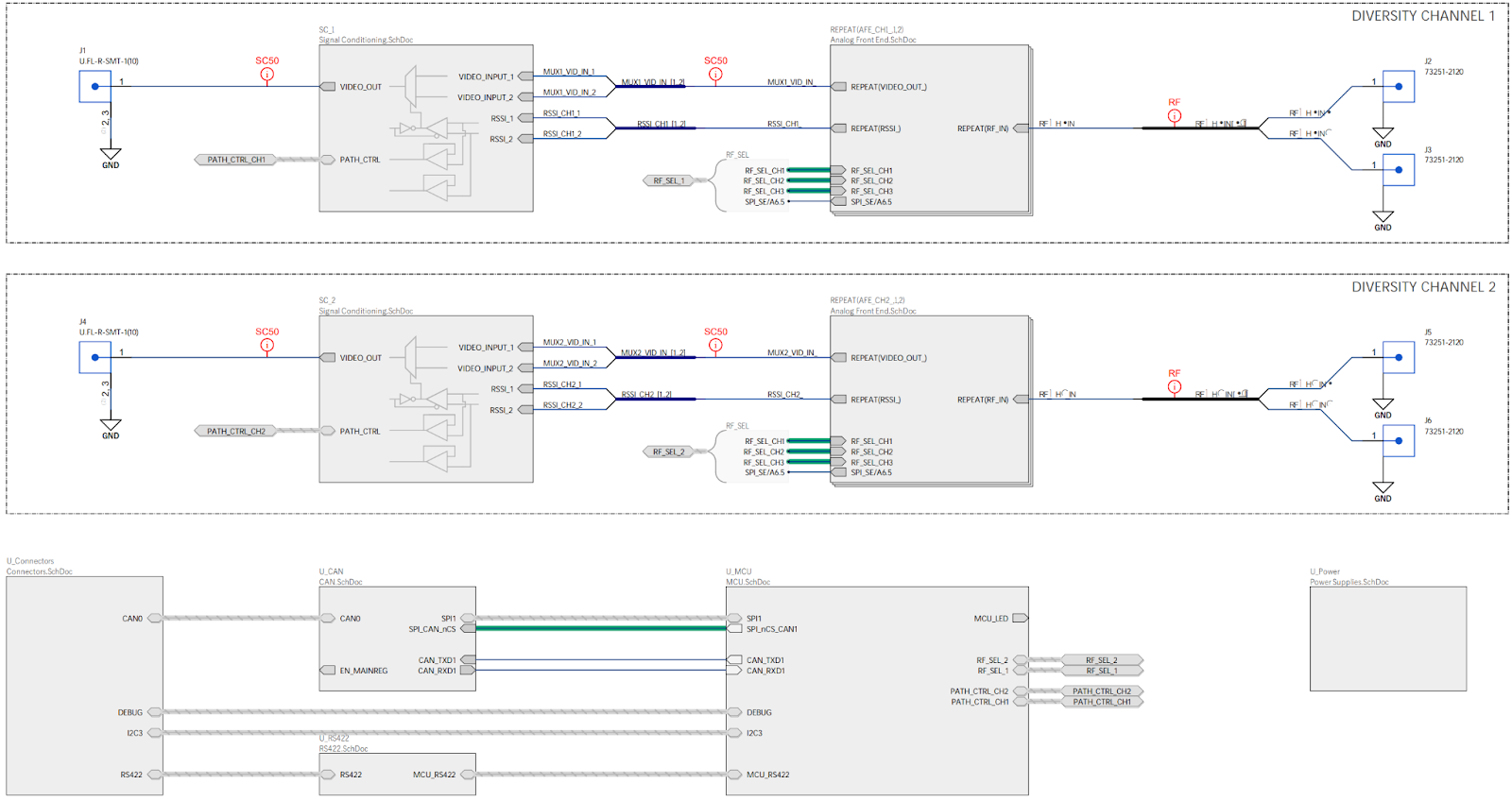
Two RX5808 modules are used per channel. Depending on the strength of the received signal, the MAX20337 multiplexer switches the video feed between these two modules.
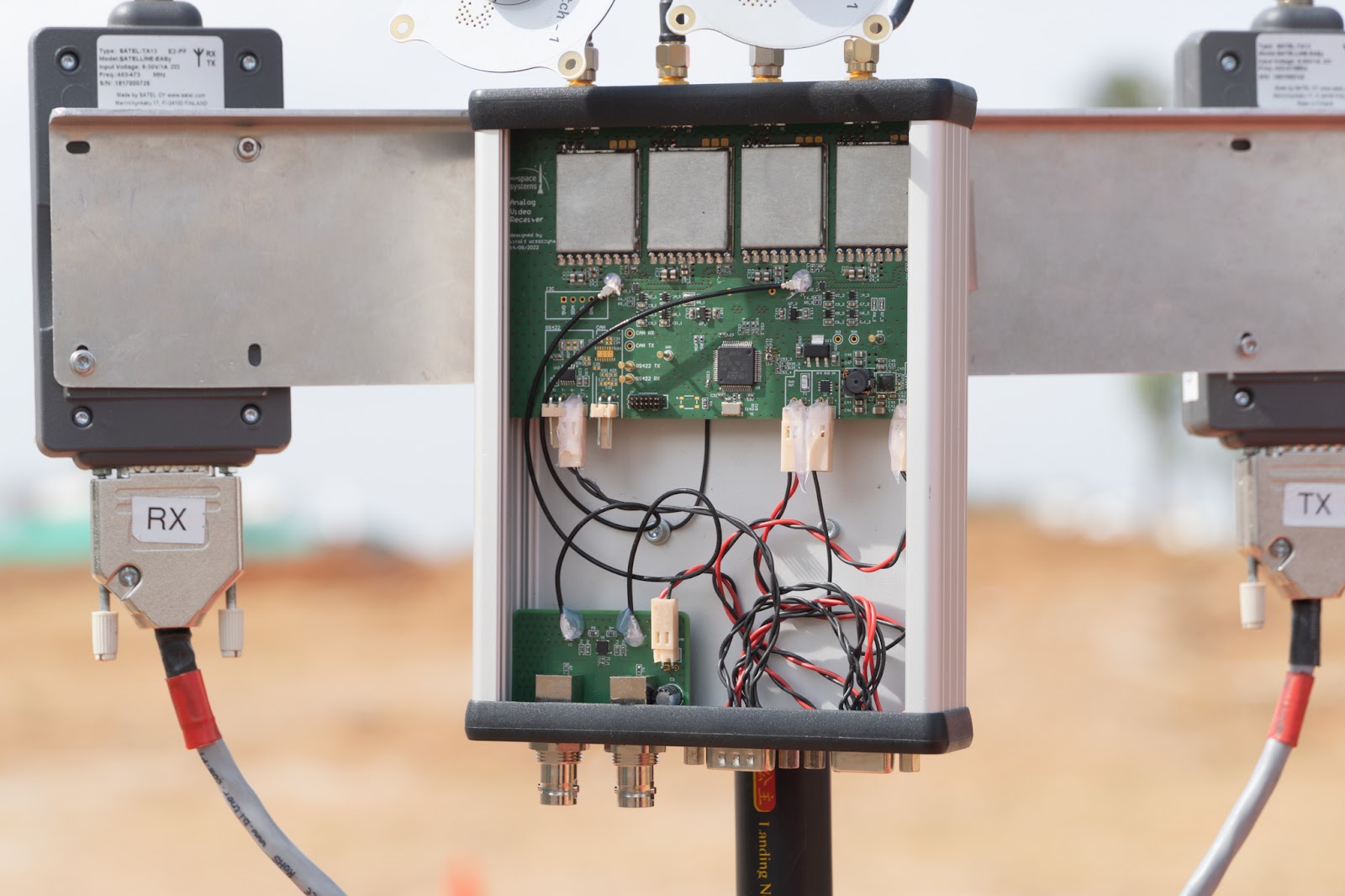
In some competitions, we need to set up our radio/video mast over 20 meters from the base station. For that case, the video signal from VRX to the monitors is connected by a 30 m long coax cable. During the development, we were uncertain if these RX5808 modules can drive cable that long. That was the reason, we also added to the VRX module a small board with a simple line driver amplifier ADA4853 to compensate for the loss on the coax.
Currently, we are working on a solution to replace heavy coax cables with just one CAT5 cable. Our idea is to replace ADA4853 with twisted-pair cable drivers for that purpose.
This project couldn’t have been executed without Aisler’s support in the form of producing the PCB board for us. We are extremely grateful to cooperate with such professionals!