As long as the team is giving their best in various competitions, members must tackle new challenges. One of the most demanding tasks is developing a deep sampling mechanism that can extract soil samples. Beyond a complex mechanical design, it also requires an electronic driver PCB to control the motors effectively.

As mentioned earlier, more and more competitions from the Rover Challenge Series require participants to solve Deep Sampling problems. For example, NASA’s Mars Rover – Perseverance seals samples and leaves them on the surface. There would be other subsequent NASA missions, in cooperation with ESA, where they would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis. Our team doesn’t have to fly on Mars, however, development of a reliable, multiple-launch module, which would collect and store samples is already a really demanding task.
The goal of the project was to create a DC motor controller for three units, as specified in the project requirements. In some competitions, we need to drill up to 30 cm deep samples. As our mechanism collects more samples, the motors consume more energy to counteract the opposing torque caused by friction and other forces and therefore, it must handle significant loads relative to its size.
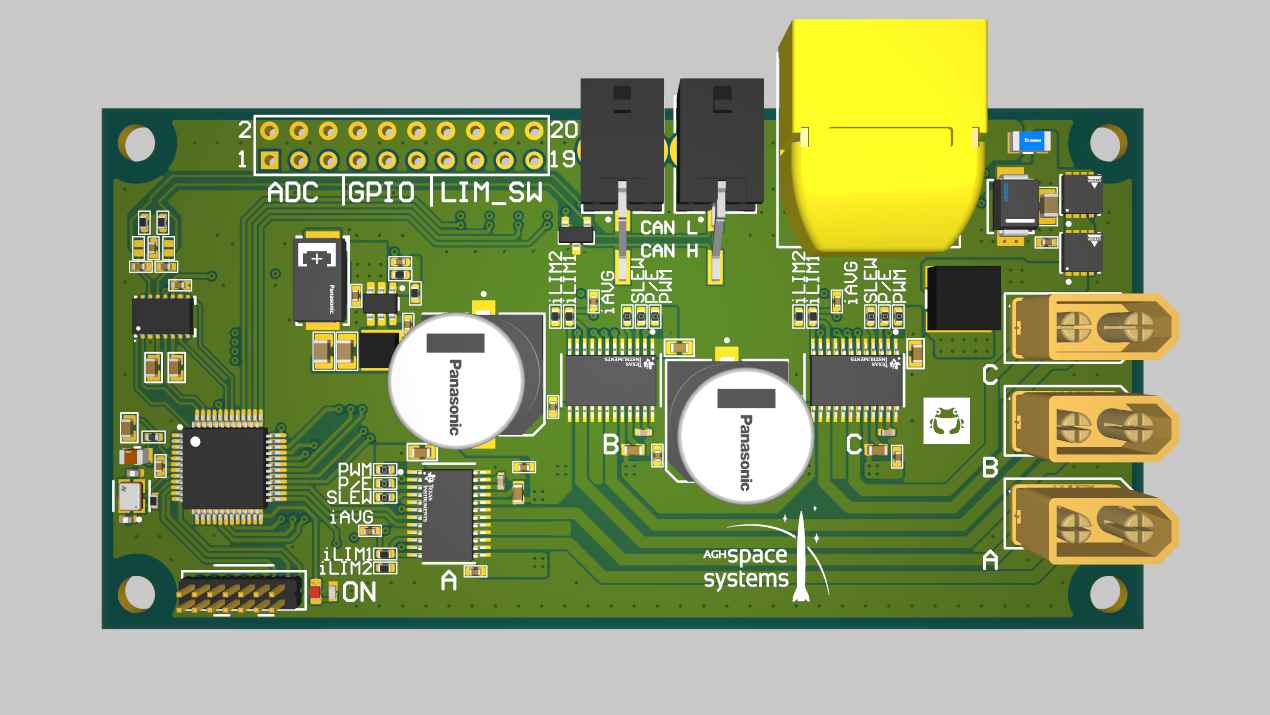
The board includes integrated DRV8873 H-bridge motor drivers, designed for controlling brushed DC motors in industrial applications. Each module is dedicated to a separate motor. It allows us to independently control all degrees of freedom within the mechanism.
To ensure reliable communication even as current increases and generates adverse EMI, the module uses the differential CAN-FD protocol. Onboard, we use a TCAN1144 transceiver, which also has an SPI interface for monitoring bus status and faults. This setup gives us confidence in maintaining a stable connection.
Currently, we are developing a module designed to provide enhanced flexibility in motor selection. We aim to replace the brushed DC motor driver with something more versatile, enabling us to use different motor types under demanding conditions. In particular, we are looking forward to exploring BLDC motors, which are more reliable.
This project would not have been possible without Aisler’s support in manufacturing the PCB board and assisting our team. We are extremely grateful to work with such professionals!