Hi there,
we’re Team Jak&Jonas from SFZ-Tuttlingen.
We are a two-member team—Jakob and Jonas—who have been competing in various RoboCup Junior tournaments over the past few years. Most recently, we achieved second place at the RoboCup German Open in the Rescue Maze category, which qualified us for the RoboCup World Championship in Brazil!

Rescue Maze – The Challenge
RoboCup Junior Rescue Maze is a robotics competition that simulates a disaster response scenario. An autonomous robot must navigate a complex maze environment to locate and assist “victims.” These victims are represented by colored markers and figures placed on the maze walls.
The robot must function fully autonomously, using various sensors and intelligent algorithms to move through the maze. It faces a range of challenges, including narrow passages, ramps, dead ends, and unexpected obstacles. The robot also needs to detect and identify different types of victims using onboard cameras.
Once a victim is identified, the robot must signal the discovery and deploy a rescue kit. After completing the mission, the robot should ideally return to the maze entrance. Scoring is based on multiple factors: the number and type of victims found, rescue precision, navigation efficiency, and successful return to base.
Our Journey
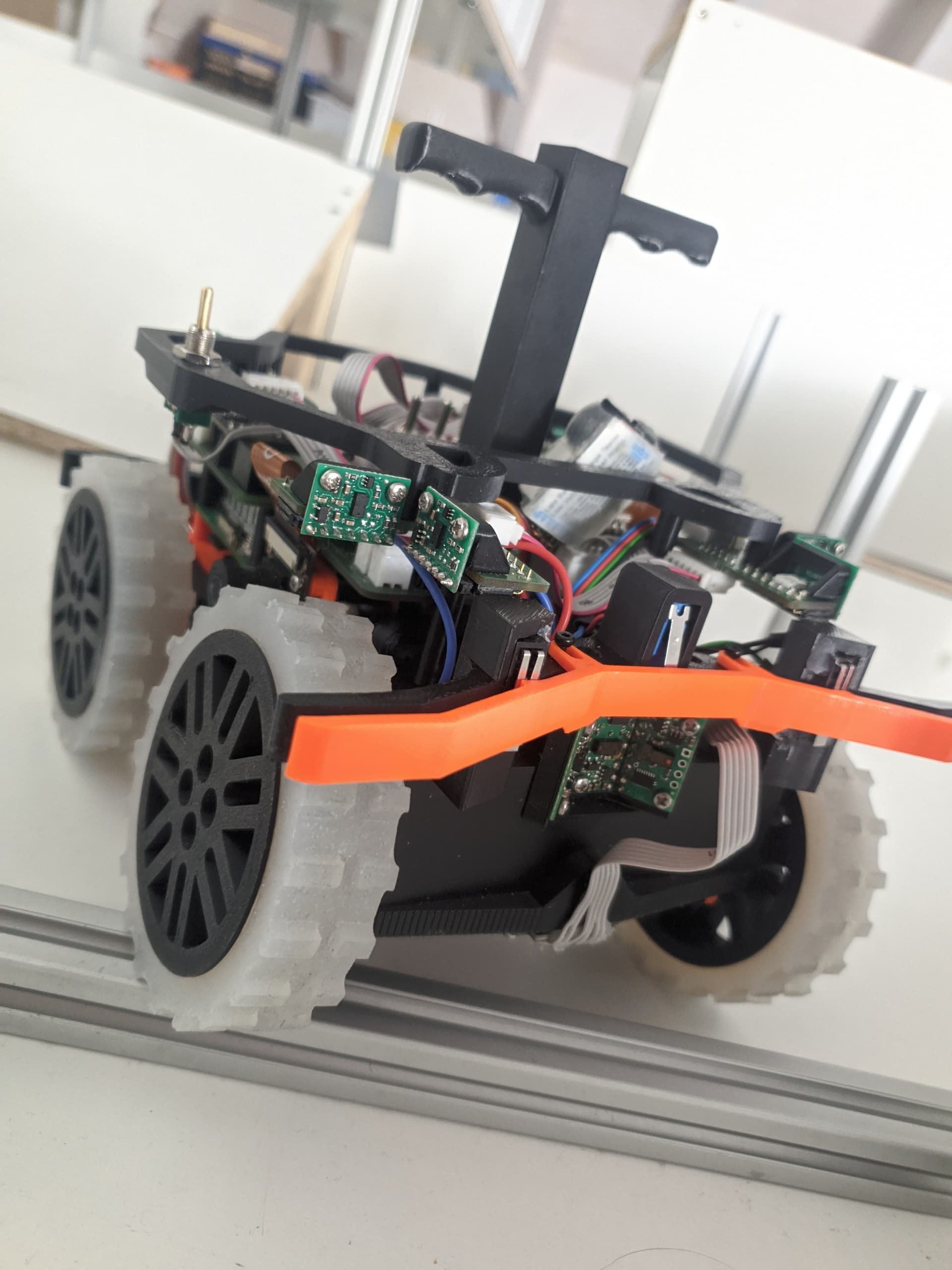
Our journey in the Rescue Maze started last year with a relatively simple robot. It was built using an Arduino Mega for the main driving and a Raspberry Pi, which handled victim detection via two side-mounted cameras.
As our robot evolved in complexity, so did the wiring—and things got messy. The original setup involved several perfboards stacked on the Arduino Mega, which became increasingly unreliable. To solve this, and to upgrade to a more powerful Teensy 4.1, we decided to develop our own custom mainboard.
The new PCB was designed in KiCad, a fantastic open-source ECAD tool. It integrates all the necessary components—display, motor drivers, gyroscope, and more—on a single board, and features JST connectors for external modules.
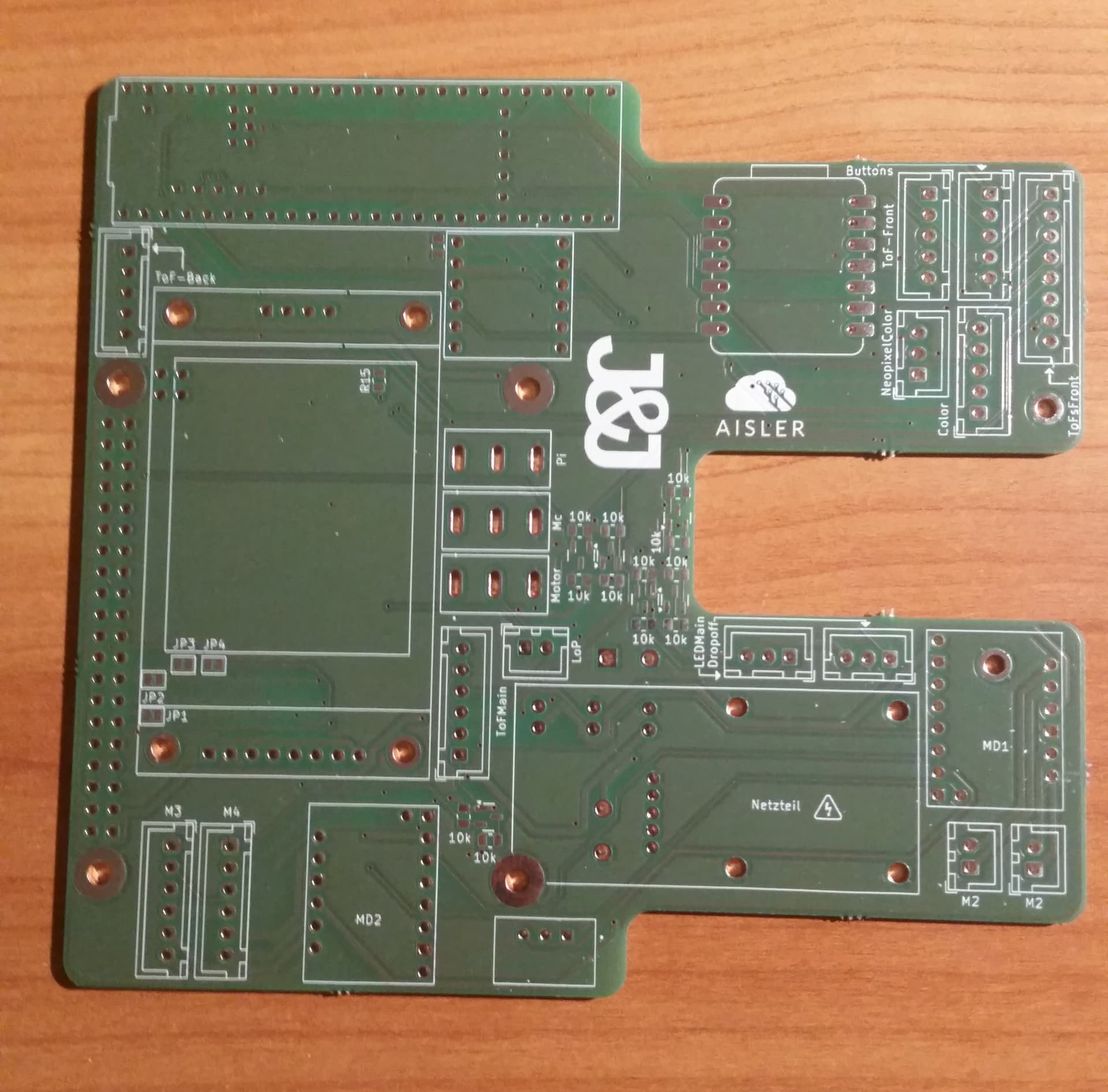
This was a game-changer: the electronics became far more compact, organized, and reliable.
Innovations Along the Way
To manage the XShut pins on our Time-of-Flight distance sensors (used for changing I2C addresses), we developed a daisy-chainable PCB. Here, we got creative—repurposing the WS2811 IC (normally used for RGB LEDs) to control the XShut pins. Instead of lighting up LEDs, the IC now controls our sensor pins.
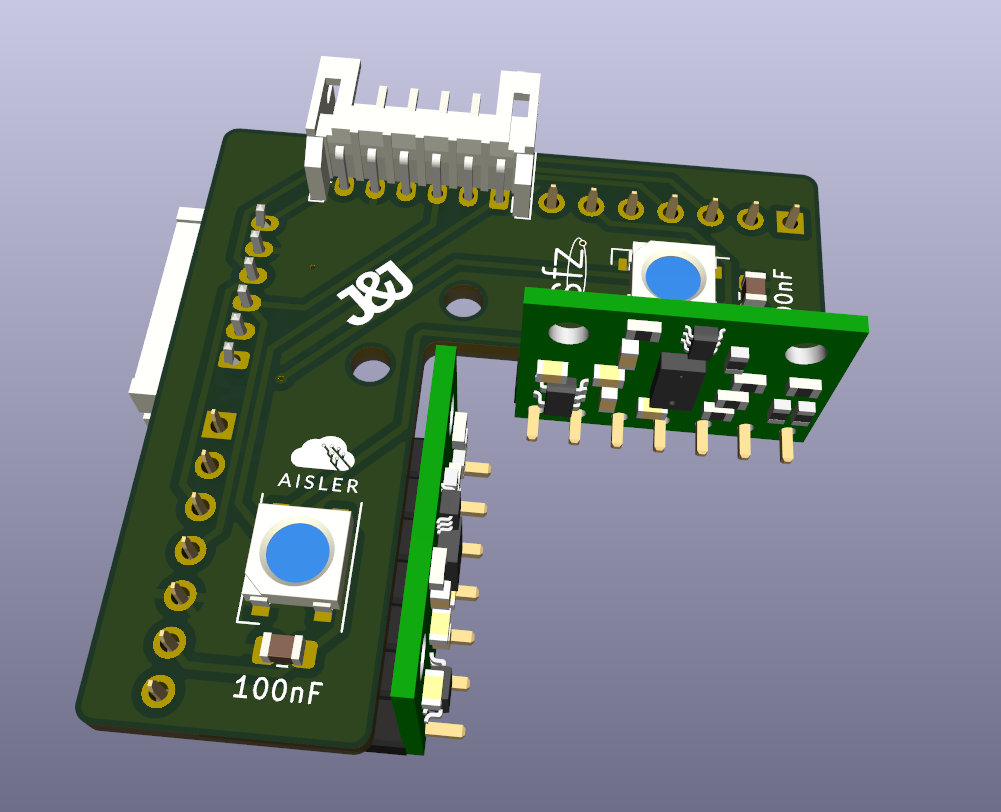
After the qualification round, we also developed our own color sensor board. Our goal was to quickly detect black tiles on the maze floor (representing holes), and adding a line sensor helped us do just that.

Thanks to Aisler Blitz manufacturing, we received our new PCB within just a few days—perfect timing ahead of the German Open.
Thank You, Aisler!
We’ve had a fantastic experience with all the PCBs produced by Aisler. The boards not only looked great, but the fast turnaround and smooth workflow made the whole process a pleasure. We especially appreciated the ability to upload KiCad files directly—no need to generate Gerbers—and the intuitive configuration panel, which is incredibly beginner-friendly.
We’re excited to continue using Aisler’s services for future upgrades to our robot and other electronics projects.
Huge thanks to Aisler for supporting our journey!
– Jakob & Jonas
Follow our journey:
![]() Instagram: https://www.instagram.com/jj_offroad_robocup/
Instagram: https://www.instagram.com/jj_offroad_robocup/
![]() YouTube: https://www.youtube.com/@JakJonasRobocup
YouTube: https://www.youtube.com/@JakJonasRobocup