Hello electricity enthusiasts.
We, the Space Team Aachen, are a student association brought together by our fascination in spaceflight. Our currently youngest project is project ASTRID a Hybrid rocket designed to compete in the 3km category at European Rocketry Challenge 2026 in Portugal.
This rocket is the predecessor to our first hybrid rocket STAHR. STAHR launched in October of last year and was developed in cooperation with the DLR. ASTRID will iterate on the design on a smaller scale to improve reliability and reusability.

To connect the different systems of this rocket an expansive electrical system is needed, spread throughout the entire rocket. By using an electrical system in this rocket predictions of the exact state can be generated at any time. By controlling actuators like airbrakes this state can be influenced dynamically and accurate adjustments can be made to achieve the desired result.
In addition, by defining common interfaces between different components a high level of modularity can be achieved, and even if the propulsion team wants to suddenly add another actuator, this can easily be realized.
In our rocket we use a central CAN Bus along power buses to distribute power and data with as few cables as possible. This implements the above mentioned interface where modules can just be plugged in or removed. The electrical system in the rocket consists of three main boards.
First and most importantly is the Battery Management Board. It controls charge and discharge of a Main Battery Pack and a Backup Battery Pack, between which can be seamlessly switched.
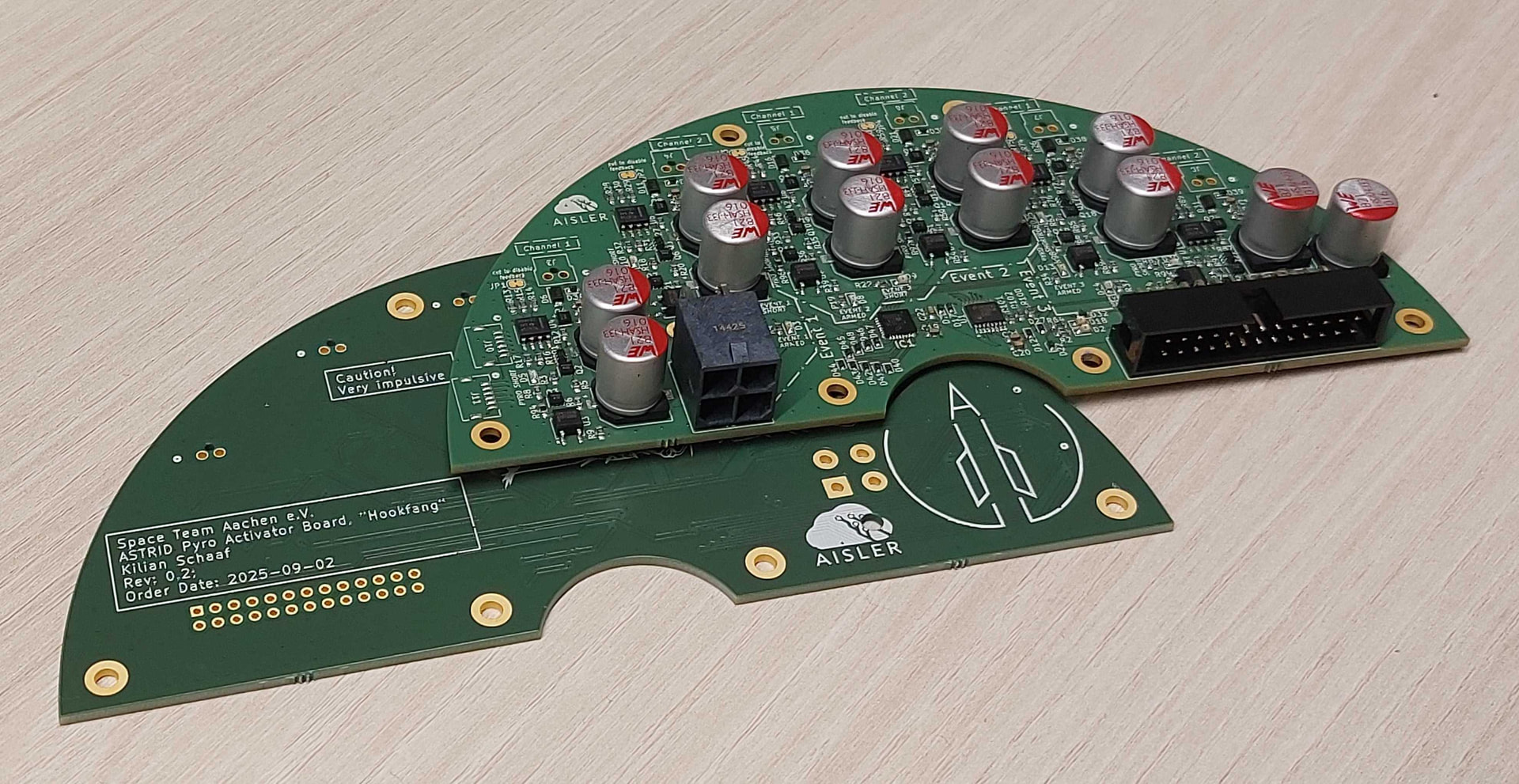
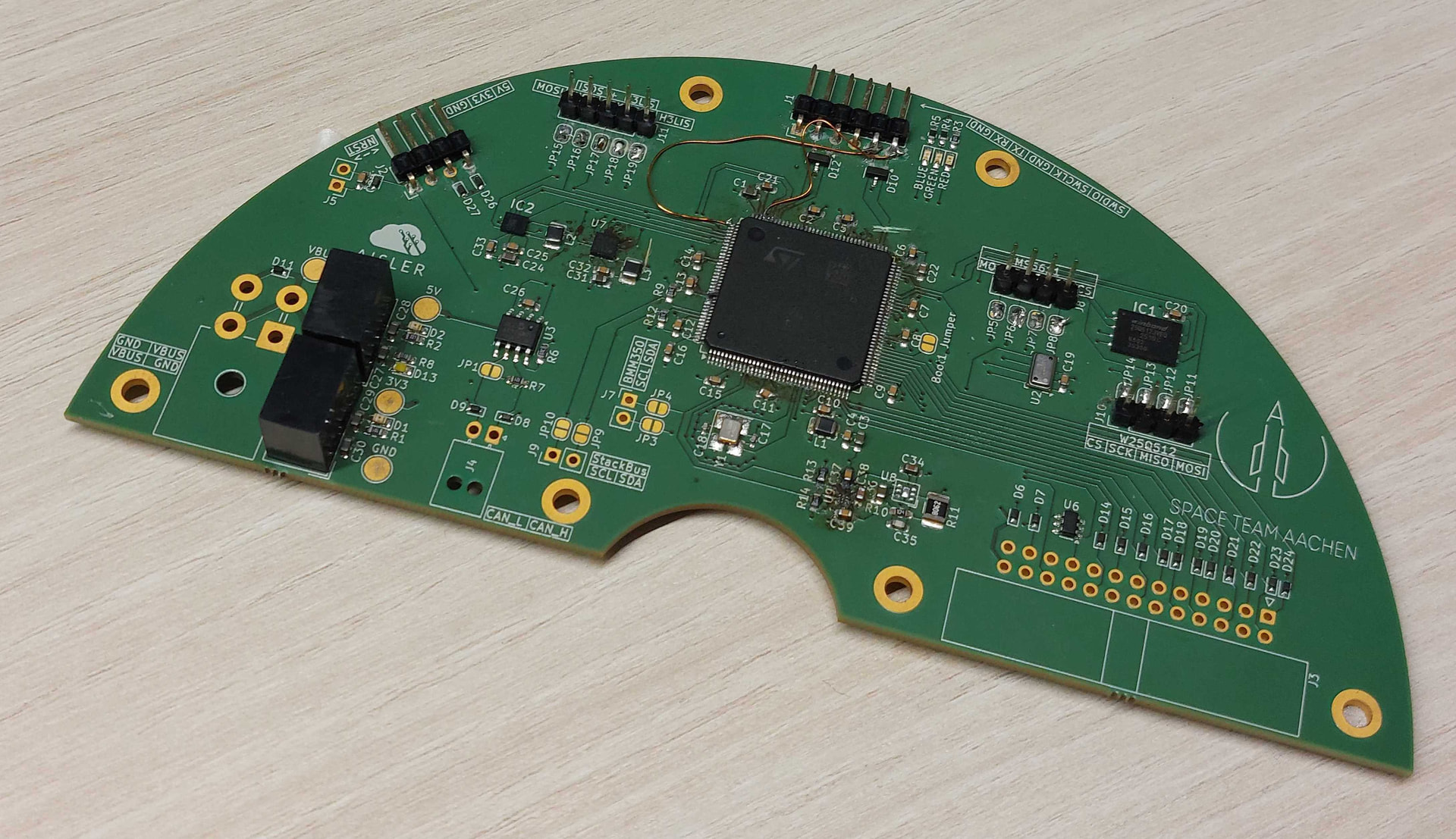
Secondly there is the Lonely Main Board. Originally two were planned for redundancy but ultimately the second one was deemed unnecessary and therefore it now is lonely. This board houses sensors for and runs the state estimation, in addition to the control algorithm for the airbrakes. It also connects to minion boards the first of which controls fluid system sensors for the oxidizer and active pressurization system, as well as a second board to supervise and activate pyro charges.
Lastly there is the Flight Communications Board. As the name already implies it is responsible for communication to the ground station during flight. This will be live telemetry collected by the various sensors in the rocket. Additionally, to keep all antennas together, the GPS is also located on this board.
We design our PCBs in KiCad. It can be paired with git to achieve quick and easy version control and distribution of different boards but also custom footprints.
When it comes to ordering the PCBs, it is hard to overstate how convenient the native support for KiCad files is. Not having to export and juggle each boards production files is really nice. Furthermore, the online PCB viewer and error checker provide additional security no design error was made, including missing stencil cutouts.
Having the option to use stencils also greatly simplifies production of the final boards, as spreading solder paste by hand or even using solder wire is, depending on the size and type of component, really hard or even impossible.
Even the best analytics tools can not protect against wrong pinouts though. This was learned the hard way, when we noticed our main board microcontroller had the wrong pins connected to the programming connector. Luckily nothing that could not be corrected with a few jumper wires and cut traces, nonetheless a pretty embarrassing error.
We would like to thank the Aisler team for supporting our project with their amazing boards and services and therefore making this project possible.