The recovery board of the NICOLLIER sounding rocket plays a crucial role in the safe return and recovery of the rocket after its mission. It is responsible for activating the nosecone separation, deploying the parachute at the appropriate stage of flight, and controlling the parachute steering motors of our guided recovery system.
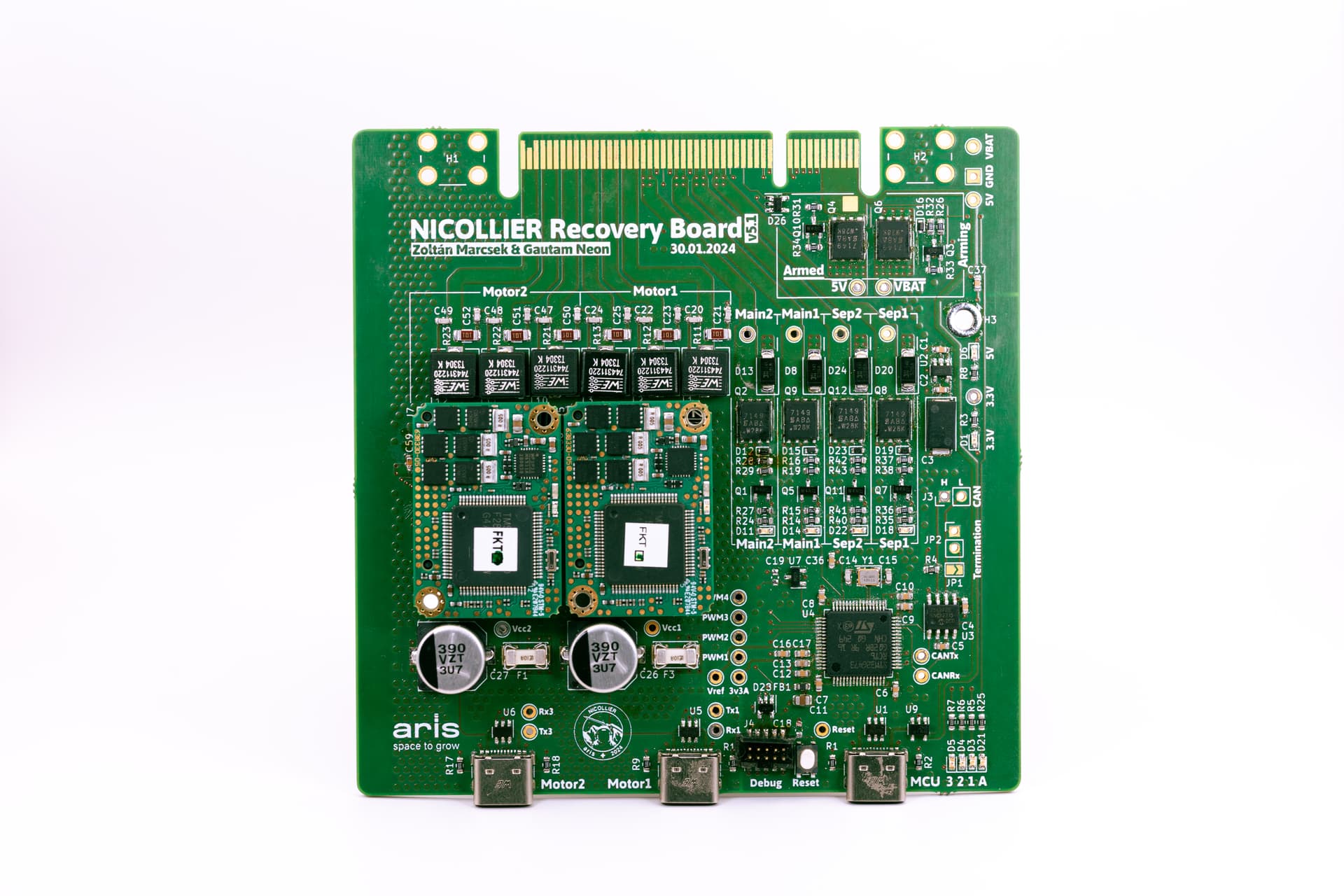
At the heart of the recovery board, it contains board-to-board connectors designed for two Maxon EPOS4 positioning motor controllers, which are responsible for driving the steering motors for the parachute. These controllers communicate with an STM32 microcontroller via UART, the microcontroller is in turn connected to the flight computer through a CAN Bus interface. This connection is responsible for delivering commands from the flight computer to the MCU on the recovery board.
In addition to the motor controllers, the recovery board features four identical high-power output drivers that are each capable of driving a servo or a high-current actuator. Furthermore, all four channels support either 24 V or 5 V operation to increase flexibility. In NICOLLIER two of these outputs are used to actuate separation using heat cartridges, and two are used for parachute deployment via high torque servos. In order to increase safety, the power supply for the four actuator channels is fed through an arming circuit, such that inserting an arming pin completely cuts off power, thus making it impossible to trigger any actuator while our members are working on the rocket.
Furthermore, this PCB design is also used as a controller for the active airbrakes system of the rocket. This system ensures that the rocket precisely reaches the desired height of 3km, by extending and retracting metal plates at the appropriate times to increase the aerodynamic drag of the rocket and prevent overshoot.
The airbrakes are actuated by a similar motor to the two used in our guided recovery system. This makes it possible to use the same PCB design for controlling the airbrakes — for this, we only populate the MCU, one EPOS4 positioning controller, and parts that are needed for CAN bus. This solution greatly reduced design and testing workload.