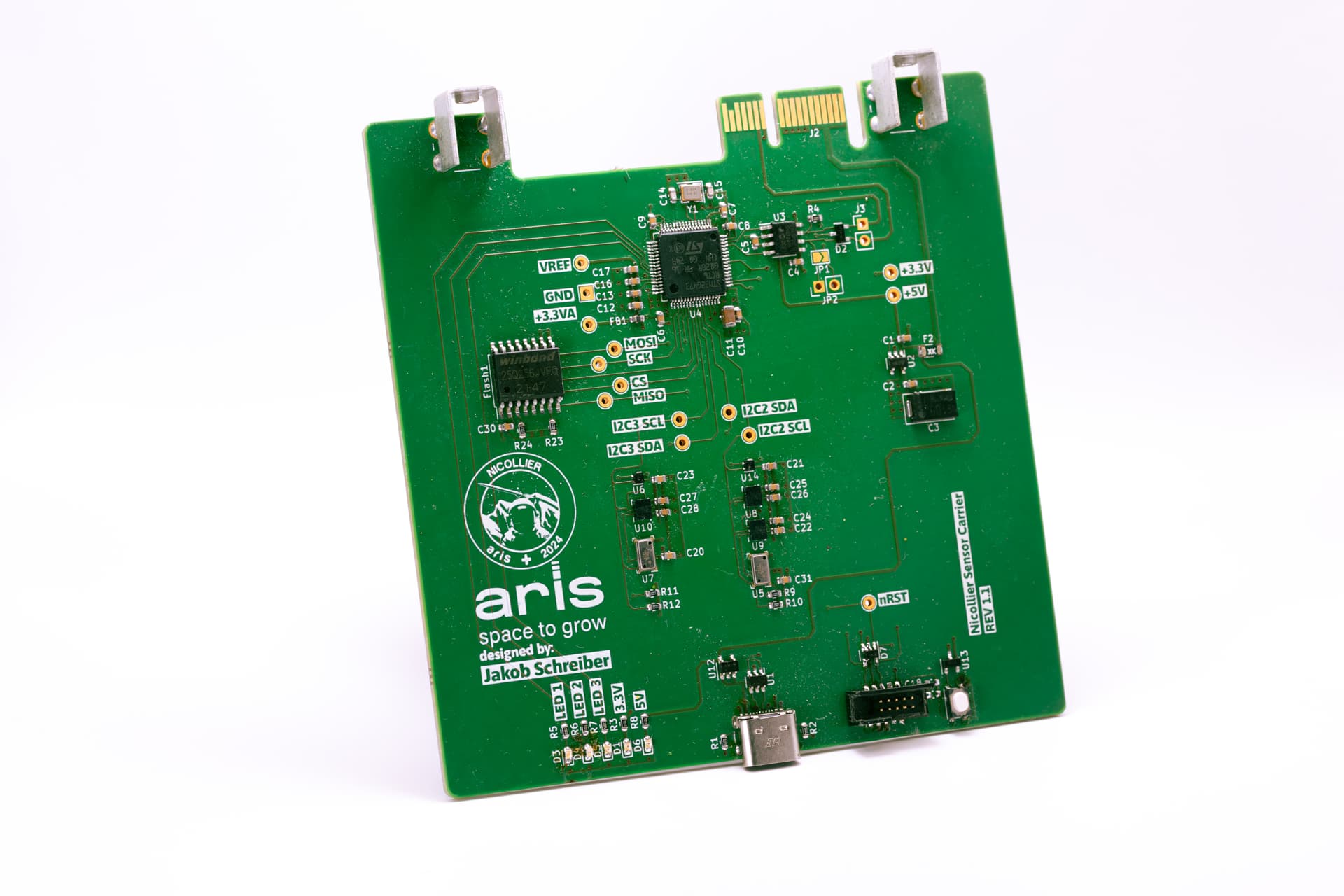
So far in our post series we have covered the flight computer, the GNSS system, the power supply, and the actuator drivers. Today, we shift our attention to another critical component of our system—the Sensor Carrier board. The Sensor Carrier board plays a pivotal role in gathering essential flight data. It collects information from a variety of sensors: Inertial Measurement Units (IMUs), barometric pressure sensors, and temperature sensors. This comprehensive data collection ensures that we can accurately monitor and adjust our rocket’s flight path during critical phases. All sensor data is transmitted to the Flight Computer via CAN Bus, a robust communication protocol that ensures reliability even in challenging conditions. For high-frequency onboard data logging, we’ve integrated a Winbond W25Q256JVFIQ Flash storage chip, connected via SPI to the microcontroller. This enables us to capture and store massive amounts of data quickly and efficiently. During the design phase, a major focus was placed on redundancy; therefore, two independent I2C lines are used to connect the sensors to the MCU. Specifically, the board utilizes:
- Three LSM6DSO32 IMUs to collect detailed acceleration and orientation data, crucial for monitoring the rocket’s orientation and status during flight.
- Two MS5607 pressure sensors to provide accurate barometric altitude measurements, essential for detecting apogee and touchdown.
- Two SHT3C temperature and humidity sensors to monitor the air inside the fairing, ensuring all systems operate within safe limits.
The redundancy and independence of these sensors are critical. They provide not only a backup in case of individual sensor failure but also allow for cross-verification of data, which greatly enhances the reliability of our state estimation algorithms. Stay tuned for our next update, where we will explore more boards within our system and how they integrate with the rest of our rocket.