Hello fellow makers,
Campus Tirol Motorsport is the Formula Student Team from Innsbruck. We build a new electric race car every year to compete in Formula Student Events against other university’s teams.
You can read more about Formula Student here and more about us here
I am excited to share with you our Telemetry system that we have built for our race car this season. The system is built on a six-layer Aisler PCB, and it is an essential part of our race car testing and development as it allows remote monitoring and limited control of various parameters. Additionally, a detailed log is saved locally for further analysis later.
Our Telemetry system is based on the Raspberry Pi CM4. The CM4 is really powerful, allowing for lots of processing and future software development headroom. But on tis on it can not connect to our car’s system. The standard Io boards that are available for the CM4 also don solve this problem and a quite bulky, so would fit our desired packaging in our ct5 racecar. So we designed our own IO board for the CM4 which includes all our desired interfaces and fits in the ct5s Brainbox snugly.
One of the core features of our Telemetry system is its ability to collect data from multiple sources. We have built-in capability for 3 serial RS485 interfaces and 2 CAN busses, allowing us to collect data from various sensors and devices. This data is then processed by the Raspberry Pi and transmitted over LTE to a server, where it is analyzed further and shared to various different tools using a WebSocket interface. Allowing everyone in the team to have a great insight in the car’s performance and find the cause for problem in the logged data.
To transmit the data in real-time, we used a Waveshare SIM7600G-H 4G HAT, which is designed for the Raspberry Pi Zero. Which we used last year but due to its limited hardware performance and availability, we upgraded to the CM4. To maintain compatibility with the Waveshare LTE HAT, we created matching pads on our Telemetry PCB, allowing us to mount the module directly onto it. We considered soldering the module chip directly onto our PCB, but decided against it as we prefer the modularity and didn’t want to compromise the RF design.
SIM7600G-H also has a built-in 10Hz GPS receiver that is able to provide valuable position information.
In addition to the Raspberry Pi and LTE module, our Telemetry system also incorporates other essential components. We have an RV-3028-C7 RTC backed up by a small silver oxide battery, ensuring that our system’s clock keeps running even when the low voltage system of the race car is switched off. This allows us to have a correct time for the logs even in cases where no LTE or GPS connection is ever established. We also have an EMC2301 fan controller that manages the cooling fan for our system, ensuring that it stays cool, even under heavy loads.
Overall, our Telemetry system has been an invaluable tool for us as we strive to improve our race car’s performance with this new and improved version. We are incredibly grateful to Aisler for sponsoring us, and we hope that our project inspires others to create innovative solutions using their platform, which allows us to iterate quickly now on even more complex PCBs which the 6 layer option.
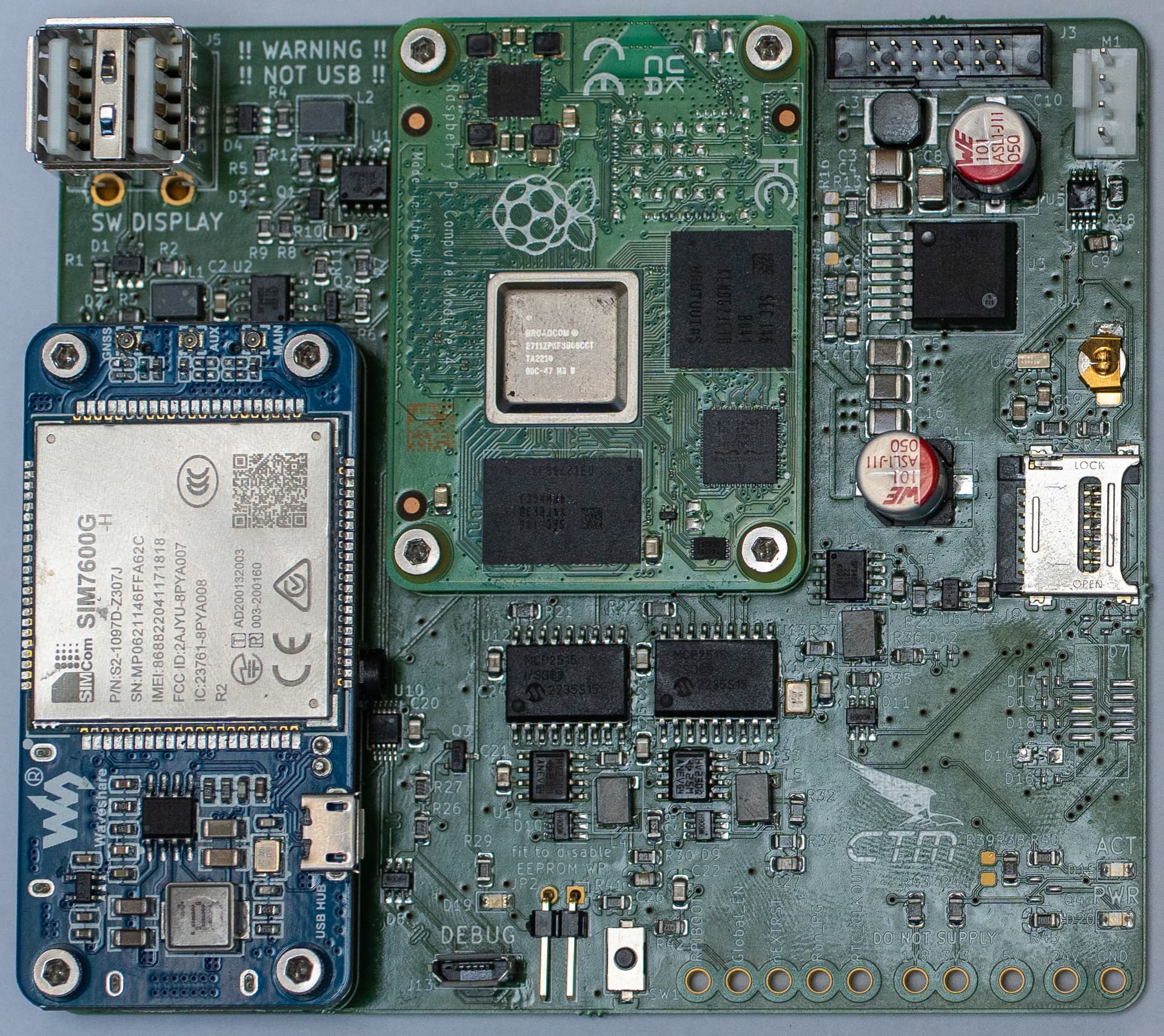
The Telemetry system PCB has the LTE module on the left, the CM4 in the centre and below it, and the CAN peripheral ICs. In the top right corner, there is a 12-42V to 5V 3A power supply, and below it, the real-time clock hardware. The PCB also features connectors for the driver’s display, steering wheel, connecting to the rest of the brainbox and a header for a possible expansion with a radio module to communicate with the driver. Also many testing points and features on the board to make debugging easier.
Campus Tirol Motorsports first driving car the e03 on the Nordkette in Innsbruck.
